Indoor Positioning has always been an important field of application for IoT. In recent years it has become very popular topic, mostly due to the iBeacon technology promoted by Apple, and adopted by other vendors. It’s a perfect application for supply chain management and logistics. Such solutions have been implemented with RFID chips already very early and are among the first IoT applications ever developed. The ability of determining a position inside buildings is one of the most important features in that area. The development clearly goes far beyond the blue dot on a map.
An application scenario where the combination of position data and business logic leads to significant added value is the anonymous tracking of itineraries in office buildings. The system can analyze the data and draw the conclusion which meeting rooms are occupied. It can also suggest booking a free meeting room.
Research Proposal
Title: Indoor Positioning System (IPS)
Introduction:
While today’s more sensitive GPS chips can sometimes get a fix inside a building, the resulting location is typically not accurate enough to be useful. The signals from the satellites are attenuated and scattered by roofs, walls and other objects. Besides, the error range of many GPS chips can be larger than the indoor space itself.
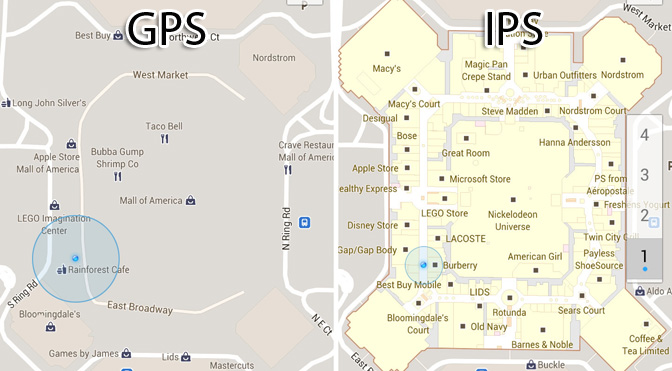
IPS can be used to locate people or objects inside buildings, typically via a mobile device such as a smart phone or tablet. IPS relies on technology like wall or ceiling mounted beacons that work together in detecting a user’s or object’s location, deriving an exceptionally accurate position.
Purpose:
The purpose of this research is to
- Study about possible technologies for Indoor Positioning System
- Come up with use cases
Research Paper
Most of the research on indoor location involves a set of fixed beacons on well-known positions, and a moving beacon signal receiver. What if the beacon was moving, and the receiver were fixed? Such a scenario can have many uses, where it is beneficial that the positioned object is as simple as possible, e.g tracking items in a warehouse. It is much easier to equip each cart with a beacon, than with a device capable of calculating the distance.
Hardware Used
- Raspberry Pi 3 ( Because it has built in WiFi and Bluetooth)
- Estimote Proximity Beacons
Trilateration
It is the process of determining  absolute or relative locations of points by measurement of distances, using the geometry of circles, spheres or triangles.
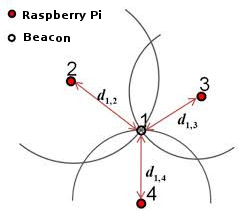
We installed 3 Raspberry Pis inside a room which listens to Beacon Eddystone UUID packets, and sends them to a MQTT server. The neat thing about MQTT is that you don’t have to worry about connecting or reconnecting, the publishers and subscribers can be started and stopped anytime, and things work as expected.
On the other end, a Node.js based web app subscribes to the three Raspberry Pis, parses and filters the packets and feeds them to the positioning algorithms. The results are then displayed on the screen.
![]()
The distance of the beacon from the raspberry pi is calculated by using the measured Received Signal Strength Indicator (RSSI), and hence determine a circle, on which the beacon must be. Having three such measurements, it is possible to estimate the position in a 2D plane. Even after performing data filtering, the distance obtained was very unreliable, it would fluctuate randomly. Due to this reason, calculation the exact position of the beacon in the room turned out to be a big challenge.
Proximity Based Positioning
As the Trilateration approach didn’t work as expected, we decided to use Proximity Based Positioning. Here, each Raspberry Pi are placed in a separate room. Obviously the resolution of tracking is very low in this approach. We can only determine if a beacon is inside a room or not. The presence of the beacon in the room was determined by measuring the distance of the beacon from the raspberry pi and comparing it with a pre-defined threshold.
![]()
Possible Alternate Technology
The core principle of the beacon based tracking system is based on the distance calculation using the RSSI of the data transmitted by the beacon. This method is very susceptible to noise: even a slight change in the environment causes the signal to fluctuate drastically which results in very noisy distance calculation and hence noisy position estimation.
An alternative to this approach could be the use of Time Based scheme. They are based on the accurate measurement of the propagation time of a radio signal from one location to another or the difference in arrival time of radio signal at different locations. Once this is known accurately then the distance between the transmitter and receiver can be determined since the speed of propagation of radio waves in air is known.
One module which uses Time Based scheme is the DecaWave’s DW1000. It is optimised for Indoor Precision Location and data communications for Real Time Location Systems (RTLS) and Wireless Sensor Networks (WSN). It enables the location of objects in RTLS to a precission of 10cm indoors, high data rate communications, up to 6.8 Mb/s, and has excellent communications range up to 300m.

Proof of Concept Project
Item Tracker
We have built an Item Tracking system which keeps count of inventory using Proximity Based tracking of the item. Also, certain actions can be triggered when the inventory count is below set threshold like placing orders e.t.c.
![]()
Project Details
- POC Project: Item Tracker
- SVN:Â svn://10.0.1.4/javra/rnd/int/itemTracker